歡迎關注“創事記”微信訂閱號:sinachuangshiji
文/Chelsea Yang
來源:硅谷洞察(ID:guigudiyixian)
特斯拉致死車禍的調查結果終于公布了。發生在2018年3月加利福尼亞州山景城附近的高速公路上的嚴重車禍,曾導致38歲的蘋果軟件工程師黃偉倫(Walter Huang)死亡。
在事故中,Walter Huang駕駛Model X以71英里的速度撞上了101高速公路的護欄,后面兩輛車也因此追尾,導致特斯拉的高壓電池受損,引起了火災。
美國國家運輸安全委員會(NTSB)列出了特斯拉致死的三個可能原因:第一,特斯拉Autopilot自動駕駛系統存在缺陷,第二,黃偉倫對自動駕駛系統過度依賴,導致其駕駛時玩手機分散注意力。第三,加州交通運輸部門沒能及時維修高速公路的硬件設施。
特別值得注意的是,NTSB譴責特斯拉過分夸大其自動駕駛的程度,只達到了L2自動駕駛級別,卻把自己包裝出了L5的形象。并且當事故發生時,特斯拉的前向碰撞預警系統未能提醒車主注意正在逼近的障礙物,其自動緊急制動系統也未能在碰撞前啟動。
那么,被NTSB譴責為只有L2級別的Autopilot到底是什么?其處在自動駕駛第幾梯隊里?為何特斯拉這么有自信一直堅持用 Autopilot呢?

NSTB討論大會現場,圖片來自互聯網,版權歸作者所有
Autopilot的演變史
Autopilot就是自動駕駛系統嗎?Autopilot的原始定義是指的搭載在飛機、輪船或者火箭上的控制軌道的系統,在這種系統中,人不需要一直控制,而自動駕駛的定義是指車輛能夠自動感應周圍環境并且無需人類的干預而自動駕駛,所以從原始的定義來看Autopilot是輔助系統而非特斯拉一直在公眾面前宣傳的自動駕駛系統,那是它尚未實現的、未來的目標。
2016年8月16日以后特斯拉也正式將中國官網的介紹從“Autopilot自動駕駛”改成了“Autopilot自動輔助駕駛”。其功能包括在車道內的自動輔助轉向、加速和制動,但需要駕駛員主動監控,并且雙手不能離開方向盤,一旦離開方向盤,Autopilot就會發出警告聲提醒車主將雙手放出方向盤,如果車主忽略警報,車就會自動減速,即便車主接管車輛,輔助駕駛功能也會被禁用,只有當下一次駐車時才能恢復自動輔助駕駛的功能。
在美國國家公路交通安全管理局(NHTSA)公布的自動駕駛分級體系中,特斯拉目前已經實現了L2的功能(如搭載在Honda等車上的ACC自適應巡航系統),并部分實現L3的功能,比如Autopilot能夠實現對周邊環境的監控,所以很多人把特斯拉歸進了L2.5的梯隊。
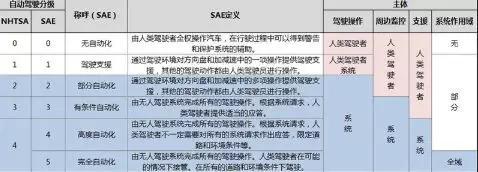
自動駕駛分級體系,圖片來自互聯網,版權歸作者所有


特斯拉官網對自動駕駛輔助系統的介紹,版權歸作者所有
Autopilot對2016年10月20日的所有新車都進行了升級,軟件升級到了8.0系統,升級了200多項功能,硬件系統從原來的Autopilot1.0升級到了現在的HW3.0,但是目前3.0還沒有完全落地到車主,所以我們重點來看看1.0到2.5的變化。
Autopilot 1.0 基于Mobileye的圖像識別技術,主要數據來自于車頂的Mobileye攝像頭,車首的雷達和周邊雷達只是提供輔助信息。
而Autopilot 2.5則是基于雷達識別環境,主要數據來源于車身上的雷達,而輔助數據則來源于高精度地圖和神經網絡數據。

特斯拉HW1.0芯片,有大量留白,圖片來自互聯網,版權歸作者所有

特斯拉HW2.5芯片,設計緊密很多,圖片來自互聯網,版權歸作者所有
堅持用雷達,特斯拉特立獨行之路
自動駕駛目前的技術分為兩大陣營,一類以特斯拉為首,還有一類是以剛剛首次獲得有外部投資參與的、22.5億美元融資的Waymo為首。
特斯拉依靠的是結合雷達、攝像頭和超聲波傳感器的數據,搭建神經網絡做實時的圖像識別,并模擬人的行為,做出判斷,而Waymo是靠比雷達更昂貴更精確的激光雷達、攝像頭、超聲波傳感器并結合已經有的高清地圖數據庫來判斷應該做出什么反應。

特斯拉官網硬件宣傳,圖片來自互聯網,版權歸作者所有
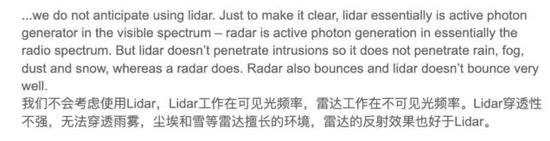
那么為什么Waymo和眾多自動駕駛研發的車廠都使用激光雷達(Lidar),而特斯拉卻堅持使用雷達(Radar)呢?特斯拉都看上了雷達什么呢?
雷達和激光雷達兩者最本質的區別在于波長不同,雷達是毫米波,通常是4-12mm,而激光雷達用的是激光波長,所以通常在900-1500nm之間。
雷達主要用的是無線電波,與激光波相比,無線電波更容易穿透物體,所以傳播距離更遠,通過反射的波,可以測到汽車的行駛速度。當交警想要測某一輛特定車輛的速度時,就可以用雷達槍來測速,這樣車輛跑到很遠也可以測到。但是,由于雷達成像的特殊性,一個很小的金屬物體可能會被識別成一堵墻,所以人們才會把目光轉向了非常昂貴的激光雷達。
激光雷達發出的是快速的激光脈沖,傳播的距離較短,但是它能精確計算出傳感器到障礙物間的距離,還能探測目標物體的準確尺寸,并且它的穿透力極強,能夠穿過雨、霧等極端天氣,受干擾較小,跟人眼看到的東西很類似。所以激光雷達被用來繪制高清地圖。

激光雷達圖,圖片來自互聯網,版權歸作者所有
目前幾乎所有研發自動駕駛的公司都在使用激光雷達,但特斯拉的車只搭載了雷達,尚未搭建激光雷達,主要原因還是成本。
激光雷達的車本過高,如Waymo使用的Velodyne的、已經量產的16線激光雷達,需要3.5萬到4.5萬人民幣,更高級的32線需要40萬,64線需要80萬,而特斯拉的車都是商用賣給普通群眾的,高額的成本必然會降低銷量,所以特斯拉目前只能使用雷達。當外界問到特斯拉未來是否會使用激光雷達時,一向傲嬌的馬斯克一直持否決態度。
圖片來自互聯網,版權歸作者所有
但是值得一提的是,特斯拉相比Waymo有數據上的優勢。目前在自動駕駛領域,處理突發情況,如突然沖出馬路的小孩等,需要非常大規模該類的數據學習,才能做到更好地處理,所以車在實際的道路上駕駛的數據就非常重要了。Waymo只在美國鳳凰城商業落地了,推出了打車服務,而特斯拉已經滿世界都在跑了。截止到2019年,特斯拉駕駛里程數為20億英里,是Waymo約2億英里的10倍。
Autopilot目前面臨的主要問題在于過度依賴攝像頭和雷達,這兩個用來檢測周圍環境的儀器都存在很大的誤差,沒有激光雷達精確,但是特斯拉相信只要要神經網絡足夠強大能夠模擬人類的駕駛行為,即便結合的是不那么準確的監測環境的數據,也能夠實現自動駕駛。
簡單來說,當特斯拉駕駛者經過一個很矮、很窄、很暗的隧道時,雷達和攝像頭都無法清晰地檢測出隧道入口的情況,Autopilot就會借用神經網絡里訓練出來的、以前的數據來計算和判斷。例如,以前有特斯拉車主曾經過這個地方,Autopilot就會學習到這些人是成功通過還是未能成功通過,當成功通過的概率達到一定比例時,這個地方就會被標記成能夠安全通過的地方。這就是Autopilot靠神經網絡學習人類駕駛行為,而不是靠非常精確的現實畫面來判斷的機理。
隨著Autopilot硬件3.0的到來,擁有海量數據優勢的特斯拉的算法迭代有可能會更加快速,對邊緣情況的處理也會隨之更加平滑。但是,目前搭載了特斯拉自主研發的芯片的HW3.0硬件系統和神經網絡的能力還非常有限,要改進極為復雜的深度神經網絡,達到和人腦相似的判斷能力,還是困難重重。
特斯拉駕駛員監控系統也有待提升
除了指出Autopilot的問題,NTSB在聽證會上還提出,特斯拉應該“合作開發”駕駛員監控系統的建議。
2018年的事故中,車主黃偉倫過分依賴特斯拉的自動駕駛功能,在駕駛時被系統多次提醒需要雙手放在方向盤以后,但依然專注于玩手機上的游戲。NTSB直言不諱地指出,如果特斯拉不加裝監控裝置,自動駕駛系統還將被濫用,類似事故還將會發生。
一直以來,特斯拉都是依靠壓力傳感器來感應車主是否將雙手放在方向盤中。早在2016年,特斯拉第一次發生致命事故時,NTSB就提醒特斯拉應開發出一套更加智能的系統,監控車主是否把注意力放在道路和交通狀況上。NTSB還強調,應該引入如攝像頭這類的視覺監控來更好地監測。
但是,特斯拉一直對NTSB的提醒總是充耳不聞,沒有任何反應。
特斯拉車主在駕駛的時候會走神、分心去做別的事情,其實也跟特斯拉早期的夸張宣傳有關系,而現在特斯拉專注技術研發,對偶發的車禍事故并沒有表現出足夠的解決問題的態度。當然,如果要按NTSB的建議,特斯拉的生產成本又要有所增加。
那么,各位讀者對特斯拉車禍有什么看法?特斯拉真的能做到低成本造車的同時保證安全嗎?